3. Gazebo World Workspace
This repository contains several Gazebo worlds, which are valuable for testing robots or agents in both indoor and outdoor environments.
3.1. Target worlds
aws_hospital
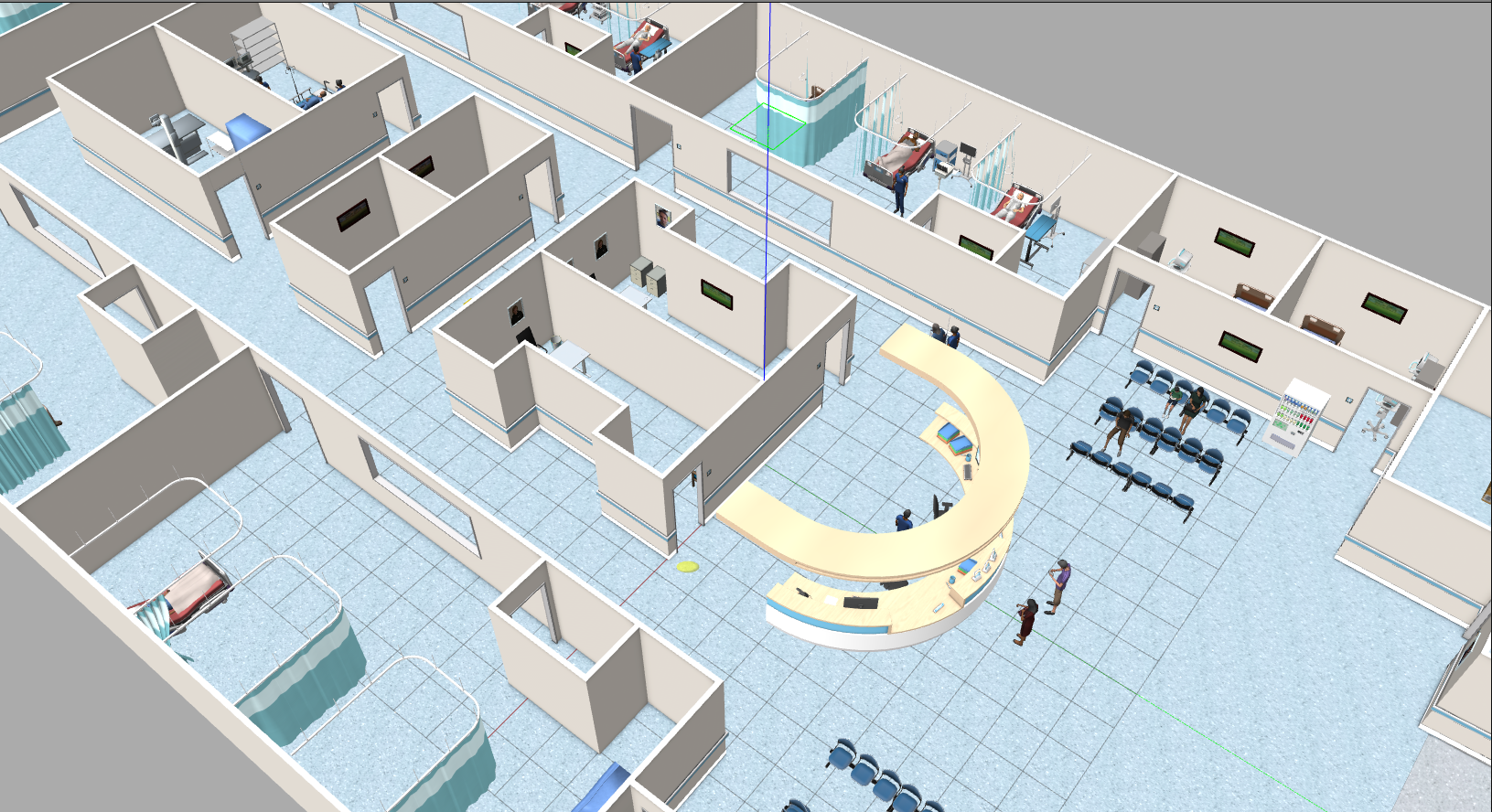
aws_hospital world
aws_small_house

aws_small_house world
citysim
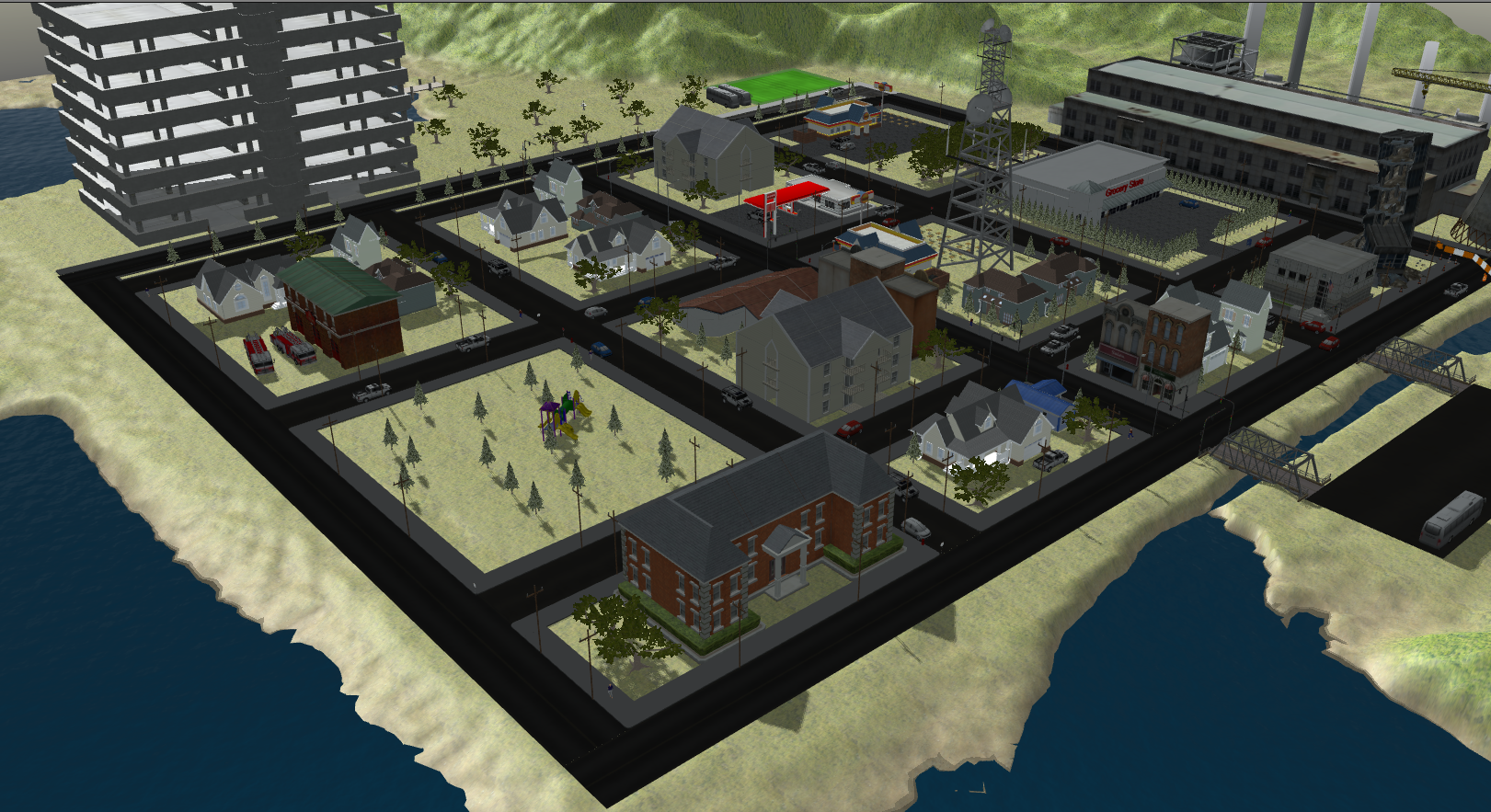
citysim world
Note
For more target worlds, please refer to the README.md file in the repository.
3.2. Building docker image
Clone the repository:
git clone https://github.com/YuZhong-Chen/LLM-Navigation.git
Build the docker image:
cd LLM-Navigation/gazebo_world_ws/docker docker compose pull docker compose up -d --build
3.3. Building the workspace
Attach to the container:
docker attach ros2-gazebo-world-ws
Compile the workspace:
colcon build --symlink-install source /home/ros2-essentials/gazebo_world_ws/install/setup.bash
3.4. Run the gazebo worlds
Launch the world:
# Replace <target world> with the name of the world you wish to launch. ros2 launch gazebo_launch <target world>.launch.py
3.5. Run the gazebo worlds with turtlebot3
Launch the world with turtlebot3:
# Replace <target world> with the name of the world you wish to launch. ros2 launch gazebo_launch turtlebot3.launch.py gazebo_world:=<target world>.world
Note
For more details, please refer to the README.md file in the repository.